ProbeAct: Probe-Guided Training-Free Failure Recovery in Vision-Language-Action Models
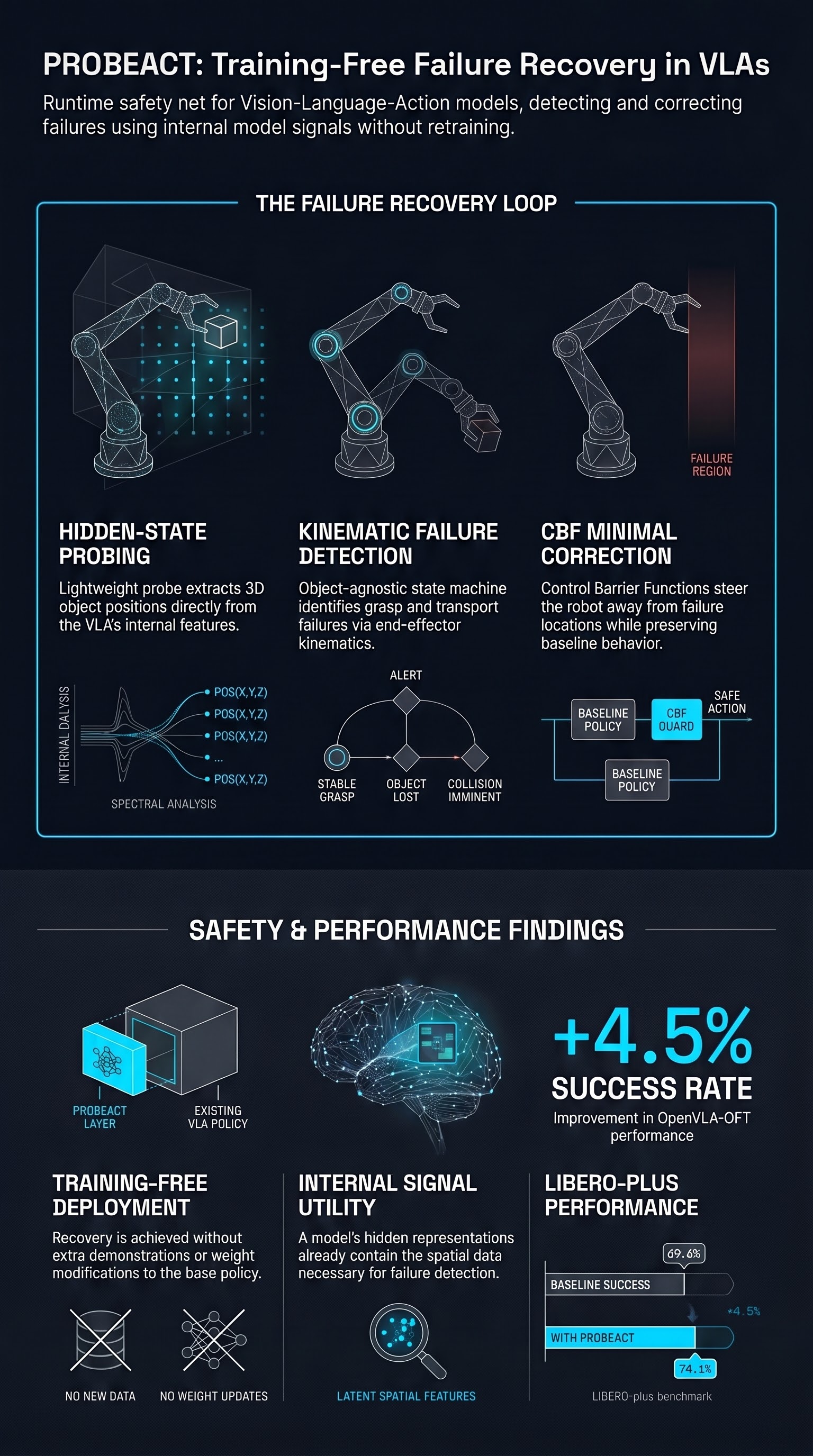
A plug-and-play runtime safety net that detects grasp and placement failures in pre-trained VLA policies using a hidden-state probe, a kinematic state machine, and a Control Barrier Function filter — improving OpenVLA-OFT success on LIBERO-plus from 69.6% to 74.1% without touching the model's weights.
ProbeAct: Probe-Guided Training-Free Failure Recovery in Vision-Language-Action Models
Vision-language-action (VLA) models do well on language-conditioned manipulation inside their training distribution and then fall over when the world shifts slightly — a lighting change, a moved camera, a small difference in the initial state. ProbeAct takes the failure-first position seriously: instead of trying to retrain the policy to be more robust, it assumes the policy will fail and builds a runtime layer that catches and recovers from those failures without modifying the model at all.
A training-free runtime intervention
ProbeAct is a plug-and-play loop that wraps a pre-trained VLA policy. It does not change weights, does not need extra demonstrations, and is described by the authors as orthogonal to existing training pipelines — it sits on top of whatever policy you already have. That framing matters for safety engineering: a recovery mechanism that requires no retraining can be applied to checkpoints that are already deployed.
Three components
-
A multi-target hidden-state probe. A lightweight probe reads the VLA’s intermediate features and predicts the 3D positions of task-relevant objects. For multi-object scenes it uses Hungarian-matched identity tracking to keep objects consistent across frames. The probe turns the model’s own internal representations into a spatial estimate the rest of the system can act on.
-
An object-agnostic kinematic state machine. This component detects grasp, transport, and placement failures using only gripper-internal signals and end-effector kinematics — no object-specific tuning. It is the part that decides that something went wrong, from cheap signals the robot already produces.
-
A hierarchical Control Barrier Function (CBF) filter. Repeated-failure locations are encoded as soft safe-set constraints. The filter minimally corrects the VLA’s actions to steer away from those locations while preserving baseline behaviour everywhere else — it intervenes only where it has evidence of trouble.
Results
On the LIBERO-plus benchmark, ProbeAct acts as a universal safety net, improving the success rate of the OpenVLA-OFT model from 69.6% to 74.1%, and the authors report broad applicability across both base and fine-tuned VLA policies. The gain is modest in absolute terms but comes from a layer that costs no retraining and leaves the underlying policy untouched.
Why this matters for failure-first embodied AI
ProbeAct is a concrete instance of the recovery-as-evaluation-axis idea this project keeps returning to: the interesting question is not only whether a policy succeeds, but whether the surrounding system can detect a failure mid-task and correct it. A few details are worth flagging for our own work:
- Detection from internal signals. Using the policy’s own hidden states as a spatial probe is a lightweight alternative to bolting on a separate perception stack, and it connects to our interest in whether a model’s representations already “know” when it is failing.
- CBF-based minimal correction. Encoding failure locations as soft safe-set constraints and correcting actions only where needed is closely related to the kinematic-shield framing in our own HANSE Layer-4 prototype work — a runtime filter that constrains action rather than rewriting policy. ProbeAct is an independent, training-free point in that same design space.
- Scope is grasp/placement failures, not adversarial attacks. ProbeAct targets distribution-shift failures (lighting, viewpoint, initial state), not a malicious adversary. It is a robustness-and-recovery contribution, and pairing it with the trajectory-level attack work from the same week sketches both halves of the embodied-safety picture.
Takeaways
- Recovery without retraining. A plug-and-play layer can raise success rates on a pre-trained VLA policy without touching its weights — useful for already-deployed checkpoints.
- The model’s hidden states are usable signal. Probing intermediate features for object positions reframes failure detection as reading what the policy already encodes.
- A runtime filter, not a new policy. The CBF stage corrects minimally and preserves baseline behaviour, keeping the intervention conservative — the right posture for a safety net.
Read the full paper on arXiv · PDF