Greedy Kalman-Swarm: Improving State Estimation in Robot Swarms in Harsh Environments
State estimation is a fundamental requirement in robotics, where the accurate determination of a robot's state is essential for stable operation despite inherent process disturbances and sensor noise.
Greedy Kalman-Swarm: Improving State Estimation in Robot Swarms in Harsh Environments
In the unforgiving theaters of search-and-rescue and extra-planetary exploration, autonomy is a gamble against entropy. For these systems, the backbone of survival is state estimation—the continuous, high-fidelity calculation of pose and velocity. In “harsh environments,” however, this backbone is under constant assault from process disturbances and stochastic sensor noise. When the estimation fails, the robot drifts. In a swarm, drift is more than an individual error; it is a systemic collapse of coordination.
The “Greedy Kalman-Swarm” (GKS) represents a fundamental paradigm shift. It rejects the traditional obsession with high-bandwidth, continuous connectivity, treating sparse, intermittent communication not as a failure state, but as a high-impact opportunity to enforce global spatial coherence.
The Consensus Trap: Why Traditional Systems Perish in the Wild
Most localization architectures are brittle artifacts of laboratory conditions, designed for environments with ubiquitous GPS or unfettered Wi-Fi. In the field, these systems rapidly reach their breaking point:
- Standard Extended Kalman Filters (EKF): While mathematically elegant, they are inherently “open-loop” regarding global position. Without external anchors, local odometric errors compound into unbounded, catastrophic drift.
- Centralized Architectures: These rely on a “master node” to process the swarm’s state. In communication-denied environments, the bandwidth required to stream raw data is unavailable, and the central node represents a single, mission-ending point of failure.
- Consensus-Based Filters: Though decentralized, these require agents to reach a global agreement through iterative communication. The bandwidth requirements for such convergence are “prohibitive,” often failing precisely when the environment becomes most dynamic.
Failure Modes in Communication-Denied Environments:
- Drift Accumulation: Error growth that renders internal maps functionally useless.
- Bandwidth Exhaustion: Systemic collapse under the weight of heavy coordination protocols.
- Brittle Convergence: The inability of multi-step consensus to adapt to real-time packet loss.
The Greedy Pivot: Embracing Sparse Correction
The GKS methodology abandons the pursuit of continuous consensus in favor of opportunistic, high-fidelity resets. To validate this without the confounding noise of multi-agent collision, the researchers utilized a single-agent proxy utilizing Pseudo-Global Localization. This proxy replicates the effect of a peer encounter—receiving a localization packet—without the overhead of simulating a hundred physical robots.
The GKS logic operates through a two-tier update cycle:
- Partial Update (IMU-fuse): During periods of isolation, the robot relies on its onboard Inertial Measurement Unit (IMU). This continuous fusion () stabilizes orientation, ensuring “orthogonal walls” in internal mapping but allowing translational uncertainty to expand.
- Full-State Update (Swarm Consensus): This is the “Greedy” mechanism. When the agent enters the relative sensing manifold of a peer (simulated every ), it treats the contact as a high-fidelity anchor. It “greedily” expands its observation matrix to , integrating the peer’s state data.
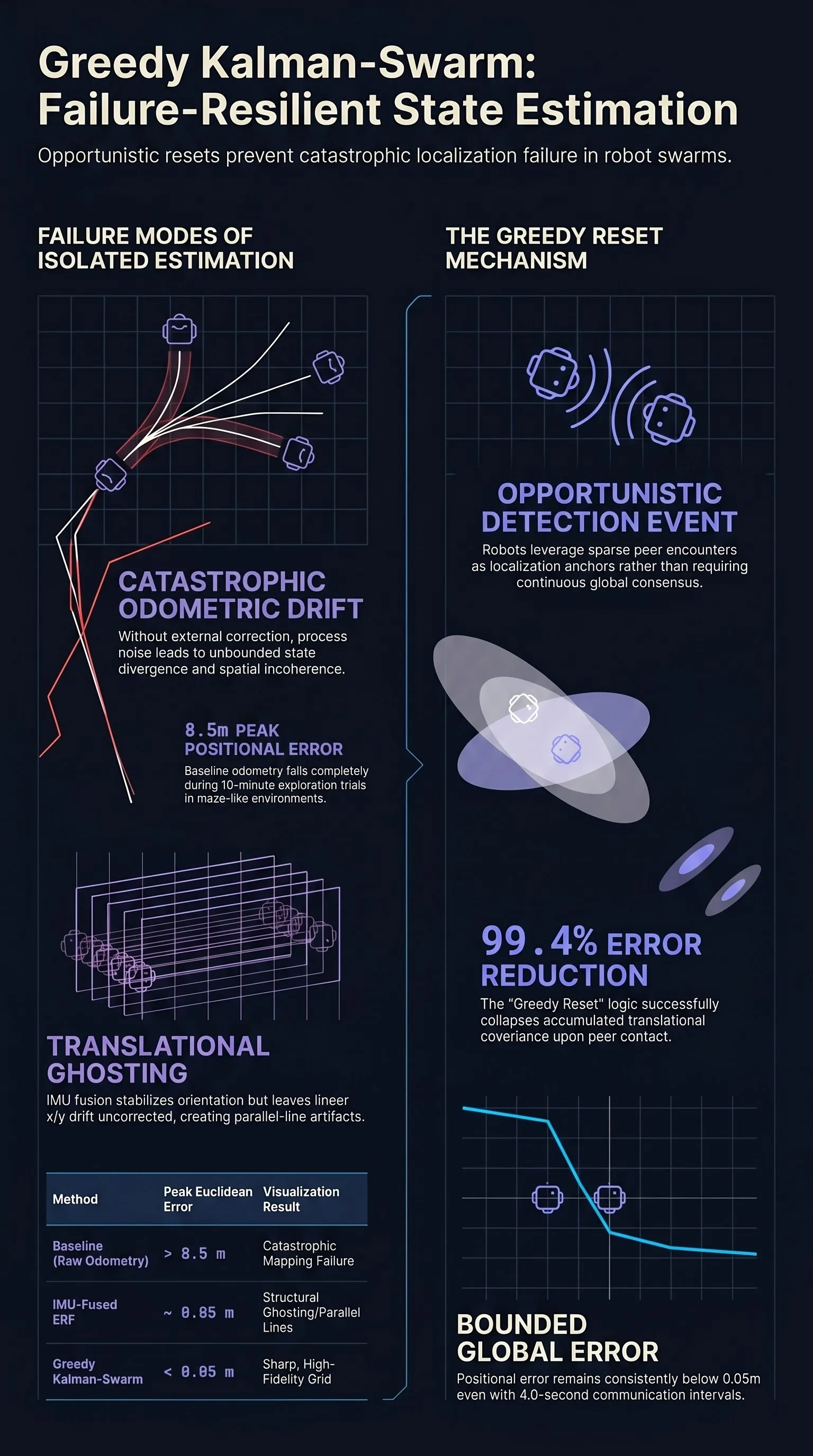
As visualized in [SOURCE_IMAGE_1], this creates a “Greedy Reset.” The expanding covariance ellipses of Figure 1a represent the growing dread of uncertainty. In Figure 1b, a peer detection occurs. In Figure 1c, the belief state “snaps” back to the global frame, a total collapse of accumulated error that restores global spatial coherence.
Visual Evidence: Mapping Through the Chaos
The map is the ultimate ledger of localization truth. In a 600-second maze exploration, the GKS demonstrated a stark superiority over traditional methods:
- The Baseline (Figure 2b): Shows total “ghosting.” Uncompensated rotational drift causes features to smear into an unrecognizable haze.
- IMU-Fused (Figure 2c): The map shows structural alignment, but reveals distinctive “parallel line artifacts.” These are the signatures of translational drift—the robot knows which way it is facing, but its and positions are hallucinating.
- The Greedy Swarm (Figure 2d): A “sharp occupancy grid” with single-pixel lines. The intermittent resets were sufficient to stop drift in its tracks.
Two critical safety mechanisms ensure this clarity. First, Confidence Thresholding () requires features to be repeatedly observed before they are committed to the map, filtering transient noise. Second, Temporal Lag Suppression suspends mapping whenever angular velocity rad/s. This prevents “rotational smearing” caused by processing delays during rapid maneuvers—a “failure-first” design choice that prioritizes data integrity over data volume.
Performance Metrics: The 99.4% Breakthrough
The quantitative results transform qualitative observations into an authoritative proof of concept. While odometry fails catastrophically, the GKS provides a globally bounded error profile.
| Model | Peak Euclidean Error (m) | Stability Profile |
|---|---|---|
| Baseline (Odometry) | Catastrophic Divergence | |
| IMU-Fused EKF | Steady Linear Drift | |
| Proposed GKS | Globally Bounded |
By calculating the Error Reduction Rate (), the study confirms that the GKS achieves a reduction in peak error relative to the baseline. This proves that we don’t need continuous “chatter” to maintain precision; we need high-impact, sparse corrections.
Failure-First AI Safety Implications
For those of us in the red-teaming and safety community, GKS offers a masterclass in resilient architecture. It addresses “covert failures”—those small, accumulating errors that evade standard evaluation until they cause a total system wipeout.
- Robustness to Isolation: GKS is designed to thrive in the gaps. It remains functional when data is missing, treating isolation as a manageable state rather than a failure condition.
- Emergent Global Awareness: By proving that coherence can be “emergent rather than enforced,” the system removes the vulnerability of a centralized “brain.” In GKS, global awareness is decentralized; you cannot “kill” the system’s spatial understanding by taking out a single node.
- Safety via Constraint: Mechanisms like Temporal Lag Suppression show that the most resilient systems are those that know when not to trust their sensors.
Conclusion & Critical Takeaways
The Greedy Kalman-Swarm moves us away from the fragility of high-bandwidth streaming and toward a future of opportunistic, high-impact resets. It is a blueprint for robots that can navigate the most unpredictable terrains on Earth and beyond, maintaining internal coherence even in total silence.
Key Takeaways for Practitioners:
- Engineered Covariance Collapse: Don’t waste bandwidth on constant low-fidelity updates. Use sparse, high-fidelity peer contacts to “snap” the belief state back to reality.
- Hybridize Sensing Scales: Maintain continuous local stability (IMU) to handle high-frequency dynamics while waiting for intermittent global corrections to bound long-term drift.
- Decentralized Resilience: Global coherence does not require a global authority. It can emerge from local, “greedy” interactions, creating a system that is robust, scalable, and inherently harder to disrupt.
As we deploy autonomous swarms into increasingly chaotic environments, the GKS provides the necessary foundation: a system that respects the reality of failure and builds its success upon it.
Read the full paper on arXiv · PDF