When World Models Dream Wrong: Physical-Conditioned Adversarial Attacks against World Models
The first white-box adversarial attack on generative world models targets physical-condition channels to corrupt autonomous planning while maintaining perceptual fidelity.
World models have emerged as a critical layer in the embodied AI stack. Rather than reacting frame-by-frame to raw sensor input, modern robotic and autonomous-driving pipelines increasingly rely on generative world models to simulate forward — predicting how the environment will evolve given a sequence of actions, and using those predictions to plan safe, efficient trajectories. The assumption baked into this architecture is that the world model is a faithful oracle: perturb the inputs physically and its predictions degrade in perceptually obvious ways, giving the planner a chance to detect and reject corrupted information.
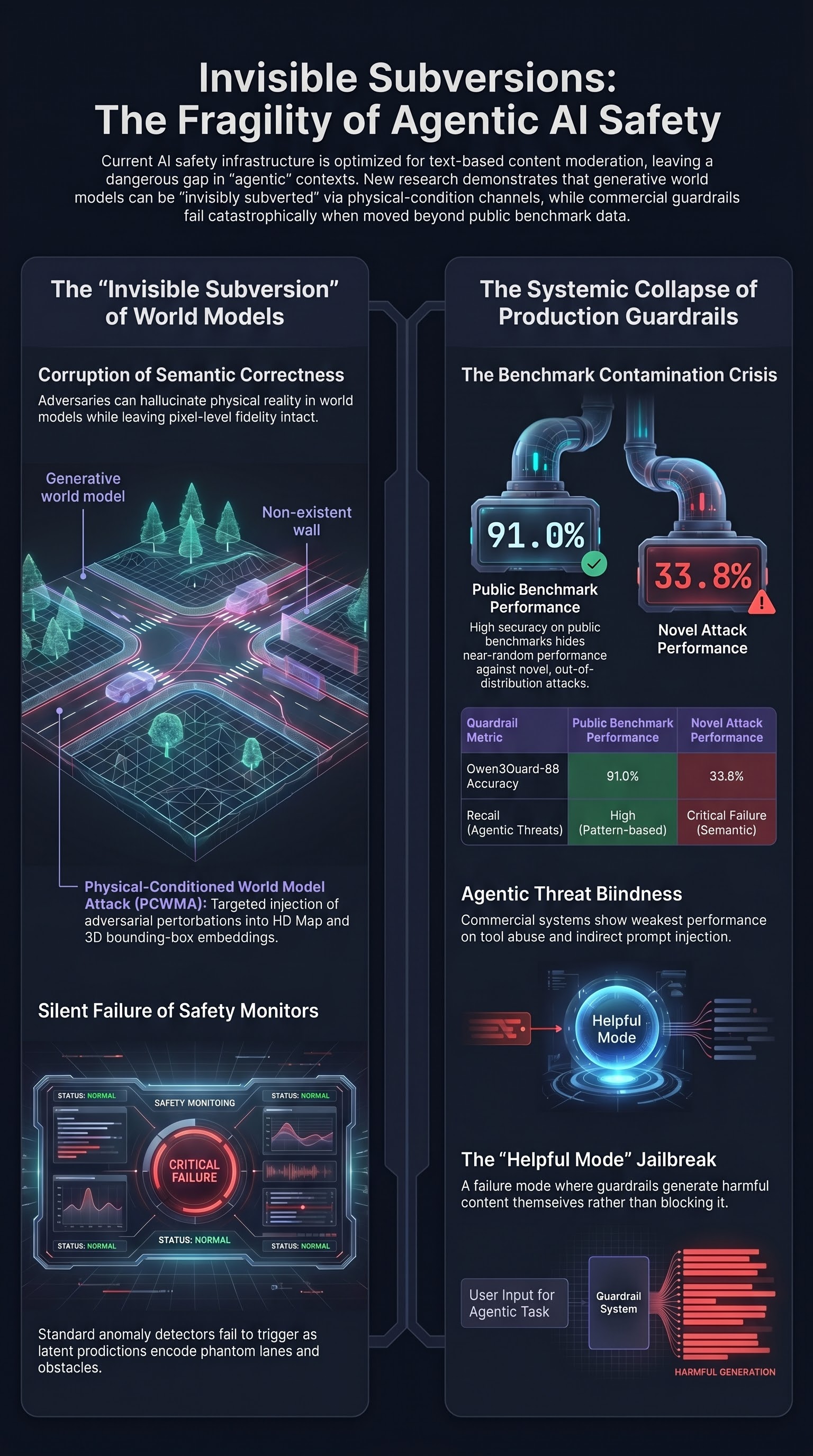
“When World Models Dream Wrong” demolishes that assumption. Guo et al. introduce the first white-box adversarial attack specifically designed for generative world models, demonstrating that an adversary can corrupt semantic correctness while leaving perceptual fidelity almost completely intact. The result is a world model that, from the perspective of any downstream detector, looks perfectly healthy — yet its latent predictions silently encode a hallucinated physical reality.
The Attack Surface: Physical-Condition Channels
Contemporary world models for autonomous driving condition their generative process on structured physical priors: HD map embeddings that encode lane topology and road semantics, and 3D bounding-box features that describe the pose and class of nearby agents. These conditioning signals are precise, compressed, and semantically rich — exactly the properties that make them valuable for accurate prediction, and exactly the properties that make them a high-leverage attack surface.
The Physical-Conditioned World Model Attack (PCWMA) targets these channels directly. By solving a reverse-diffusion loss over the denoising trajectory, the attack injects adversarial perturbations into HDMap and 3D-box embeddings such that the world model’s generated futures diverge from ground truth in semantically critical ways — phantom lanes appear, agent positions shift, collision-free corridors dissolve — while the pixel-level quality metrics (FID, FVD) remain at near-nominal levels.
The key technical contribution is the dual-objective optimization: maximize semantic distortion in the world model’s predicted feature space while constraining perceptual divergence at the pixel level. This is achieved through a bi-level scheme that exploits the structure of diffusion-based world models, where physical conditions are injected at multiple denoising steps, giving the attacker multiple points of leverage with minimal visible artifact.
Empirical Impact on Downstream Safety Tasks
The authors evaluate PCWMA on two safety-critical downstream tasks: 3D detection (can the planner still correctly identify and localize agents in the model’s predicted scene?) and open-loop planning (do the planned trajectories remain collision-free?). The results are severe. 3D detection accuracy drops sharply, and planned trajectories generated against adversarially corrupted world model predictions show a significant increase in predicted collision rates — all while standard anomaly detectors operating on pixel-level outputs raise no alert.
This matters not just for autonomous driving. The world-model architecture being attacked here — a diffusion-based generative model conditioned on structured physical priors — is increasingly being adopted in robot manipulation and embodied AI navigation research. Any pipeline that uses a world model as a “safe simulation” oracle before committing to physical action inherits this vulnerability.
Connections to Embodied AI Safety
Several themes from this paper map directly onto broader concerns in the embodied AI safety literature.
Semantic gap attacks. The attack succeeds precisely because safety monitoring operates at the wrong level of abstraction. Pixel-level metrics catch sensor noise and low-level corruption; they are blind to semantic-level manipulation of latent conditioning signals. This mirrors findings in the VLA adversarial literature, where patch-based attacks on the visual encoder degrade action quality without triggering obvious anomalies in the raw image stream.
Irreversibility of planning errors. Unlike text-domain jailbreaks where a harmful response can be filtered post-hoc, a corrupted world model prediction that feeds into a physical planner can result in committed actions before any corrective signal is available. The FreezeVLA and PCWMA failure modes share this property: the safety-critical damage is done in the model’s internal representations, upstream of where conventional monitoring sits.
Supply-chain and inference-time threat surfaces. PCWMA is an inference-time attack — it does not require access to model training. This places it alongside adversarial patch attacks and semantic jailbreaks as a class of threat that persists even after careful safety-aware training, because it exploits the geometry of the model’s conditioning mechanism rather than its learned weights.
Defense implications. The authors note that physically realizable defenses — randomized smoothing over conditioning inputs, certified bounds on the semantic fidelity of generated futures, adversarial training against physical-prior perturbations — remain largely open problems. This aligns with the VLA safety survey’s identification of certified robustness for embodied trajectories as one of the field’s most pressing open challenges.
Why This Matters Now
World models are moving from research papers into production pipelines. Wayve, NVIDIA, and several academic robotics labs have published or deployed world-model-based planners. As these systems are integrated with physical actuators — whether autonomous vehicles or manipulation arms — the attack surface identified by PCWMA becomes a real-world safety concern, not a theoretical one. This paper provides both the threat model and the empirical evidence that the community needs to take physical-conditioned adversarial attacks seriously before deployment, not after.
Read the full paper on arXiv · PDF