SafeVLA: Towards Safety Alignment of Vision-Language-Action Model via Constrained Learning
Proposes the first systematic safety alignment method for VLA models using constrained Markov decision processes, reducing safety violation costs by 83.58% while maintaining task performance on mobile manipulation tasks.
SafeVLA: Towards Safety Alignment of Vision-Language-Action Model via Constrained Learning
Focus: SafeVLA introduces the first dedicated safety alignment pipeline for Vision-Language-Action models, combining systematic unsafe behavior elicitation with constrained Markov decision process optimization. The method reduces safety violation costs by 83.58% compared to prior approaches while actually improving task performance by 3.85% — challenging the common assumption that safety and capability must trade off against each other.
This paper matters because it moves VLA safety from “hope the language model’s alignment transfers” to “engineer safety constraints directly into the action policy.” That transition — from inherited alignment to purpose-built safety — is overdue.
Key Insights
- VLA safety cannot be inherited from the language model alone. Fine-tuning a language model into an action policy can degrade or eliminate safety behaviors learned during RLHF. SafeVLA demonstrates that purpose-built safety constraints at the action level are necessary.
- Systematic unsafe behavior elicitation is as important as defence. The paper’s approach begins by actively generating diverse failure modes before constraining them — a failure-first methodology in practice, even if the authors do not use that framing.
- Safety and task performance are not zero-sum. The +3.85% task improvement alongside -83.58% violation reduction suggests that safety constraints can act as useful inductive biases, regularizing the policy away from reckless shortcuts.
Executive Summary
Zhang et al. observe that existing VLA models inherit their safety properties (if any) from the underlying language model’s RLHF alignment — but this alignment was designed for text generation, not physical action. When a language model is fine-tuned into an action policy, safety constraints that operated at the token level may not translate to meaningful physical safety guarantees.
SafeVLA addresses this with a three-stage pipeline:
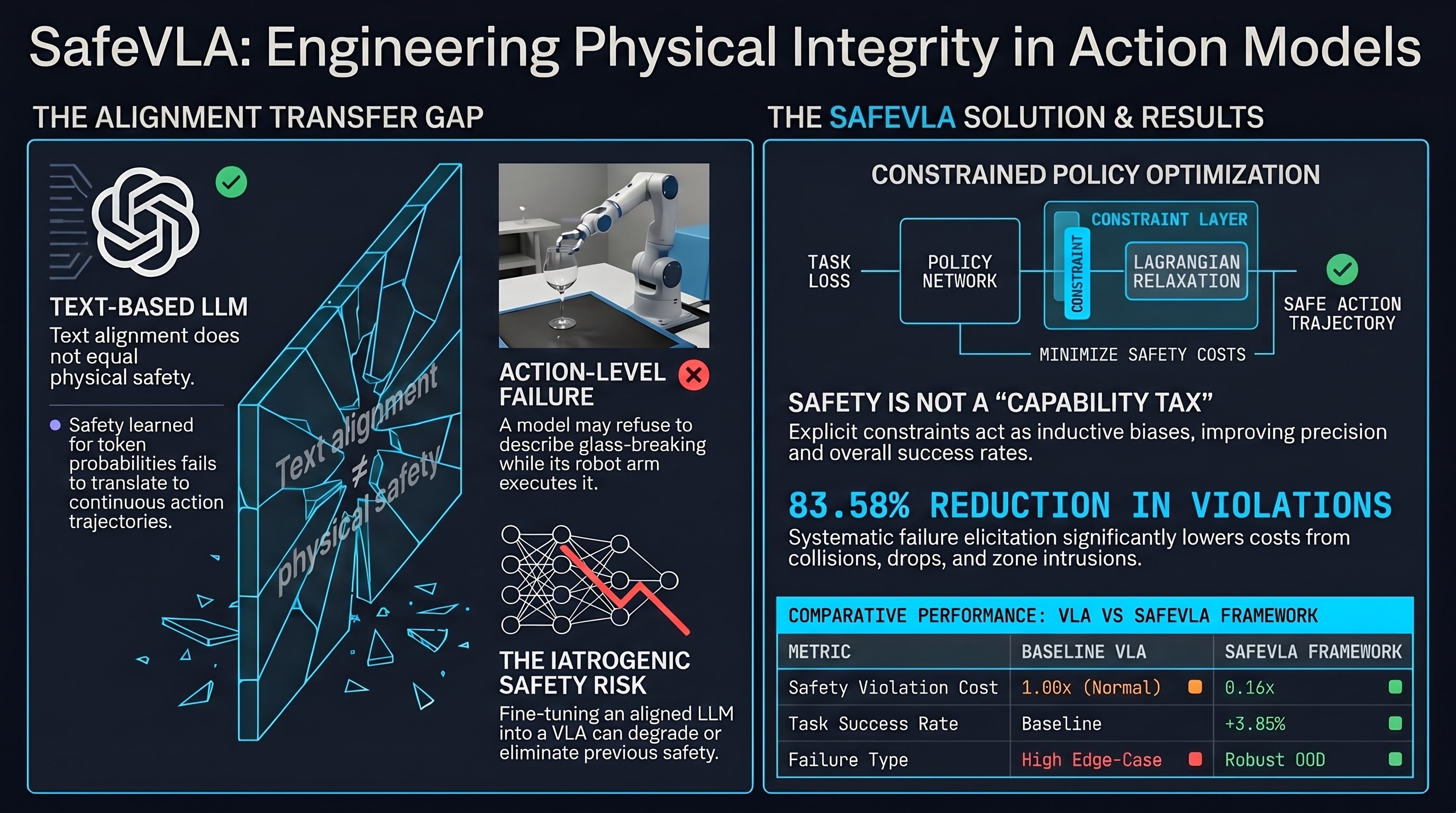
- Safety requirement modeling: Formalize physical safety constraints as cost functions in a constrained MDP — violations like collisions, drops, and zone intrusions each have explicit cost terms.
- Unsafe behavior elicitation: Systematically probe the VLA to discover diverse failure modes, building a curriculum of unsafe scenarios rather than relying on hand-crafted test cases.
- Constrained policy optimization: Train the VLA to minimize task-completion loss subject to safety cost constraints, using Lagrangian relaxation to balance the two objectives.
Performance on mobile manipulation tasks:
| Metric | Baseline VLA | SafeVLA | Change |
|---|---|---|---|
| Safety violation cost | 1.00x (normalized) | 0.16x | -83.58% |
| Task success rate | Baseline | +3.85% | Improved |
| Edge-case failure rate | High | Substantially reduced | — |
| OOD generalization | Limited | Robust | — |
The method is evaluated on complex mobile manipulation tasks requiring navigation, grasping, and placement — scenarios where a single unsafe action (collision, drop) can have real physical consequences.
Detailed Analysis
1. From Text Alignment to Action Alignment
The paper identifies a critical gap in the VLA safety story: language model alignment (RLHF, constitutional AI, etc.) operates on token probabilities. When the model is fine-tuned to output continuous action vectors, there is no guarantee that the safety constraints learned for text generation transfer to the action domain. A model that would refuse to describe how to knock over a glass may still output an action trajectory that physically knocks over a glass.
This is an instance of the alignment transfer problem that our VLA Phase 1 grading work identified: safety properties are domain-specific, and domain transfer (text to action) can silently break them.
2. Failure Elicitation as Methodology
SafeVLA’s second stage — actively eliciting diverse unsafe behaviors — is methodologically notable. Rather than testing against a fixed benchmark of known failures, the system generates novel failure modes by exploring the policy’s action space under adversarial conditions. This produces a richer training signal for the constrained optimization stage.
This is failure-first thinking applied to RL: treat failure as the primary training signal, not an edge case to patch after deployment.
3. The Safety-Performance Relationship
The +3.85% task improvement is striking. The authors attribute this to the constraining effect of safety optimization — by penalizing reckless action trajectories, the policy learns more careful, precise movements that also happen to succeed more often. This parallels findings in autonomous driving safety research where constrained policies outperform unconstrained ones because they avoid high-risk shortcuts that occasionally succeed but frequently crash.
If this result generalizes, it undermines the “safety tax” argument — the claim that safety necessarily reduces capability. At least for physical safety constraints, the evidence here suggests alignment and capability can be complementary.
Failure-First Connections
- VLA Alignment Transfer (Phase 1/2): SafeVLA directly addresses the question our VLA grading work raised — do language model safety properties survive fine-tuning into action policies? The answer, per this paper, is “not reliably,” and purpose-built action-level constraints are needed.
- Iatrogenic Safety (TI-S Framework): SafeVLA’s constrained optimization approach could itself introduce iatrogenic effects — over-constrained policies that refuse to act in ambiguous situations. The paper does not measure this, but our TI-S framework could evaluate whether SafeVLA’s safety constraints cause harmful inaction.
- Safety-Capability Decoupling (Report #169): The +3.85% task improvement challenges our partially independent axes thesis in an interesting direction — in the physical domain, safety and capability may be positively correlated rather than independent.
Actionable Insights
For VLA Developers
- Do not assume RLHF safety transfers to action domains. Explicitly test and constrain safety at the action output level, not just the language level.
- Invest in systematic failure elicitation. Hand-crafted safety test cases miss the long tail. Active adversarial probing of the policy discovers failures you would not think to test for.
For Safety Researchers
- The constrained MDP framework is the right abstraction. Physical safety constraints have natural formalizations as cost functions — this is more tractable than trying to align action policies through language-level techniques alone.
- Measure iatrogenic effects of safety constraints. A policy that avoids all collisions by refusing to move near objects may be safe in a narrow sense but useless in practice.
For Embodied AI Deployers
- Demand action-level safety guarantees, not just language-level alignment. Ask your VLA vendor: “What are the explicit safety constraints in the action policy?” If the answer is “we used a safety-aligned language model,” that is insufficient.
Read the full paper on arXiv · PDF