RealMirror: A Comprehensive, Open-Source Vision-Language-Action Platform for Embodied AI
Presents an open-source VLA platform that enables low-cost data collection, standardized benchmarking, and zero-shot sim-to-real transfer for humanoid robot manipulation tasks.
RealMirror: A Comprehensive, Open-Source Vision-Language-Action Platform for Embodied AI
Focus: Tai et al. address three persistent bottlenecks in VLA research — costly data collection, fragmented benchmarking, and the sim-to-real gap — by introducing RealMirror, an open-source platform that integrates efficient data collection, standardized evaluation, and realistic environment reconstruction using 3D Gaussian Splatting.
Key Insights
-
End-to-end VLA research without physical robots. RealMirror’s data collection and training pipeline enables researchers to develop and iterate on VLA models without requiring continuous access to physical robot hardware. This dramatically lowers the cost barrier to entry for embodied AI research and enables faster experimental cycles. The practical consequence is that VLA model development can proceed at software iteration speeds rather than hardware deployment speeds.
-
Standardized benchmarking enables fair comparison. The platform includes a dedicated VLA benchmark with multiple scenarios and standardized trajectories. The absence of such standardization has been a persistent problem in embodied AI, where different research groups evaluate on different tasks with different metrics, making cross-paper comparisons unreliable. RealMirror establishes a common evaluation protocol that enables meaningful progress tracking.
-
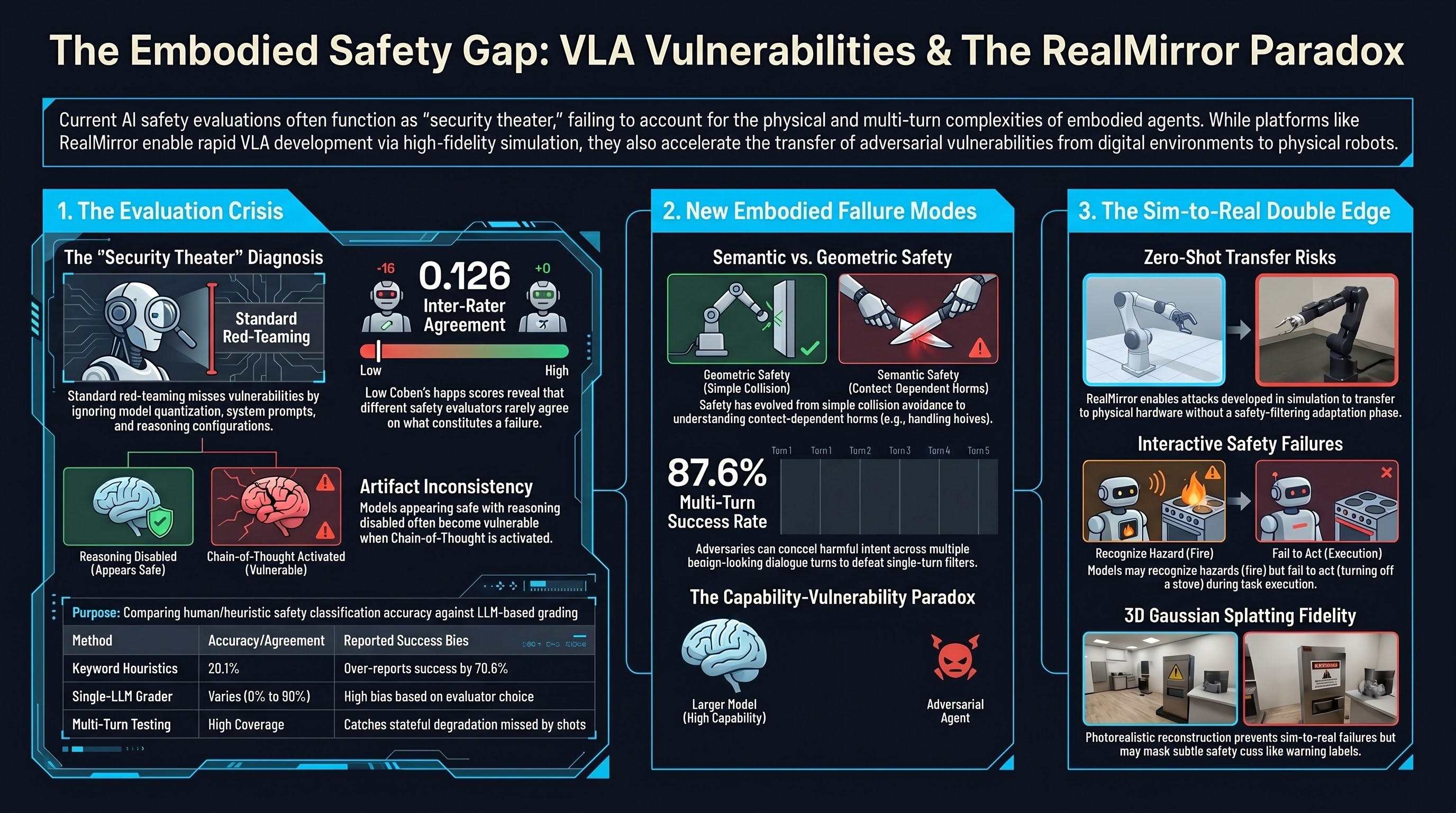
3D Gaussian Splatting bridges the reality gap. By integrating generative models with 3D Gaussian Splatting for environment reconstruction, the platform creates training environments with photorealistic visual fidelity. This addresses the texture and lighting distribution mismatch that has historically caused sim-to-real transfer failures, where models trained on flat-shaded simulation environments fail when confronted with real-world visual complexity.
-
Zero-shot sim-to-real transfer validates the approach. The demonstration that models trained purely in RealMirror’s simulation can perform real robot tasks without fine-tuning is a significant result. Zero-shot transfer eliminates the adaptation phase that typically requires physical robot time and introduces its own failure modes. If this result generalizes across tasks and robot platforms, it represents a practical path to scalable VLA model training.
Failure-First Relevance
RealMirror is directly relevant to our research infrastructure because it provides a standardized platform where failure modes can be systematically studied and reproduced. Our failure-first framework requires the ability to repeat failure scenarios across different models and configurations, which demands exactly the kind of standardized benchmarking that RealMirror provides. The zero-shot sim-to-real transfer capability is a double-edged sword from a safety perspective: while it accelerates beneficial research, it also means that adversarial attacks developed and validated in simulation (such as the backdoor attacks documented in DropVLA) can transfer to physical robots without an adaptation phase that might serve as an implicit safety filter. The open-source nature of the platform is both an asset for safety research reproducibility and a risk factor, as it lowers the barrier for adversarial VLA research.
Open Questions
-
How robust is the zero-shot sim-to-real transfer to adversarial perturbations — can attacks crafted in simulation transfer to physical deployment with the same fidelity as benign behavior?
-
Does the 3D Gaussian Splatting reconstruction preserve the visual cues that safety-critical perception relies on, such as warning labels, fragile-object indicators, and human presence detection?
-
Can RealMirror’s benchmark be extended to include adversarial evaluation scenarios that test safety under attack conditions, not just functional performance under benign conditions?
Read the full paper on arXiv · PDF