GuardReasoner: Towards Reasoning-based LLM Safeguards
GuardReasoner trains safety guardrails to produce explicit reasoning chains before verdicts, outperforming GPT-4o+CoT and LLaMA Guard on safety benchmarks while improving generalization to novel adversarial inputs.
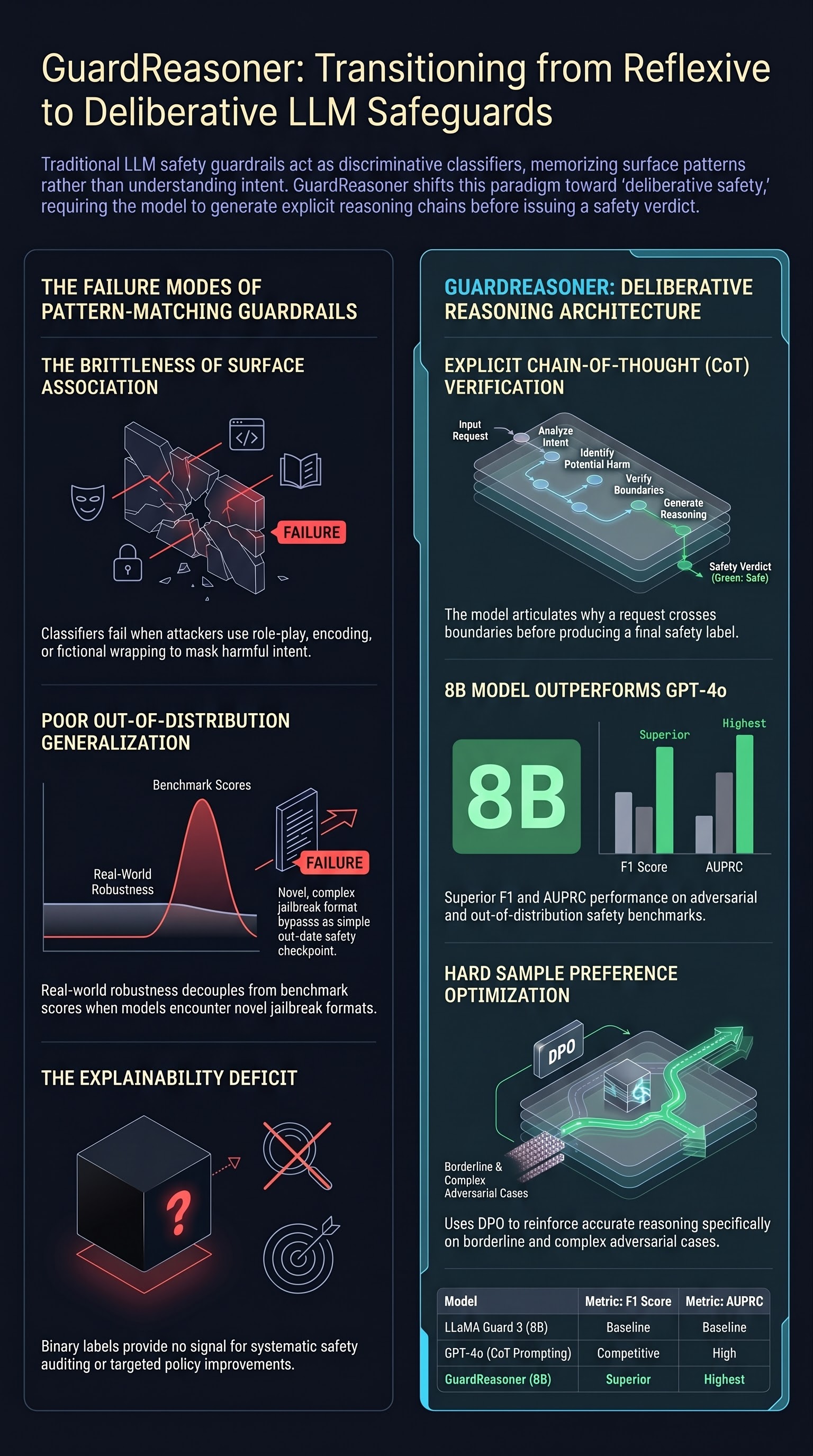
The dominant paradigm for LLM safety guardrails is discriminative classification: given a conversation, output a binary safe/unsafe label. Llama Guard and its descendants exemplify this approach. They are efficient, practical, and work well on distribution-matched benchmarks. But they have a structural weakness that becomes apparent the moment an adversary starts pushing: they cannot reason about why something is harmful. GuardReasoner, from a team across National University of Singapore and collaborators, proposes replacing reflex with deliberation—training the safeguard model to think out loud before it judges.
The Classification Guardrail’s Failure Modes
Safety classifiers trained to label inputs as safe or unsafe operate as sophisticated pattern matchers. They learn to associate surface features—certain phrasings, topic words, structural patterns—with harmful intent. This works until an attacker changes the surface features while preserving the underlying harmful request. The history of jailbreaks is largely a history of discovering which surface transformations the guardrail didn’t learn to associate with harm: role-play framings, base64 encoding, ASCII art, fictional wrapping, low-resource languages.
Two failure modes compound the problem:
-
Poor out-of-distribution generalization. A novel jailbreak format—one not represented in the training distribution—routinely bypasses guardrails that achieve near-perfect performance on standard benchmarks. The benchmark score and the real-world robustness are decoupled.
-
No explainability. A binary label gives operators no signal about the nature or severity of the detected harm. This makes systematic safety auditing difficult and makes it nearly impossible to improve the guardrail in a targeted way.
The GuardReasoner Architecture
GuardReasoner addresses both failure modes by training the safeguard to generate an explicit chain of reasoning before producing a safety verdict. The intuition is straightforward: a model that can articulate why a request is harmful is exercising a more generalizable form of safety judgment than a model that has simply memorized which surface patterns to flag.
The training pipeline has three components:
GuardReasonerTrain Dataset. The authors construct a purpose-built dataset of (input, reasoning chain, safety label) triples. Each reasoning chain explains the rationale for the safety decision: what harm is being requested, why it crosses a safety boundary, and what contextual factors are relevant. This supervised signal teaches the model to produce coherent, accurate safety reasoning—not just to predict labels.
Reasoning Supervised Fine-Tuning (SFT). The base model is fine-tuned to generate reasoning chains that align with human safety judgment. This is the primary mechanism through which GuardReasoner learns to generalize: by grounding its decisions in explicit reasoning steps, the model can apply those steps to novel inputs rather than defaulting to surface pattern matching.
Hard Sample Direct Preference Optimization (DPO). Standard fine-tuning tends to plateau on easy cases while leaving hard cases—novel jailbreak formats, borderline requests, adversarial phrasings—underoptimized. The authors specifically construct a hard sample set, train competing reasoning chains (correct vs. incorrect rationale), and apply DPO to reinforce accurate reasoning precisely where the model is most likely to fail.
Performance
GuardReasoner outperforms both GPT-4o with Chain-of-Thought prompting and LLaMA Guard 3 8B on standard safety benchmarks across F1 score and AUPRC. More importantly for deployment robustness, it shows improved generalization to adversarial and out-of-distribution inputs—the class of threats that standard guardrail benchmarks systematically underrepresent.
The explicit reasoning chains also provide a form of interpretable safety monitoring. A flagged interaction comes with a human-readable explanation of why it was flagged, enabling operators to distinguish between false positives, true positives with nuanced context, and novel attack patterns that warrant updating the safety policy.
Connections to Embodied AI Safety
GuardReasoner is evaluated in the text domain, but its implications directly extend to the safety infrastructure needed for embodied AI systems. VLAs and embodied agents that use LLMs as planning backbones face safety challenges that are fundamentally harder than text-only jailbreaks:
- An agent planning a multi-step manipulation task must reason about whether each step could cause physical harm—not just whether the language of the request sounds harmful.
- Adversarial inputs to embodied systems can be subtle: a slight rephrasing of an instruction, an unusual object placement, or a novel scene configuration might cause a VLA to plan an unsafe action sequence.
- Embodied agents operate in open-ended environments; no training distribution can cover all possible physical situations that trigger unsafe behavior.
A reasoning-based safety module that can articulate why a planned action sequence is unsafe—“this trajectory brings the end-effector into contact with a person who has not moved out of the way”—is qualitatively more useful for embodied deployment than a module that outputs an unsafe label with no explanation. The reasoning chain can be used to request clarification, trigger a safety halt, or generate a corrected plan.
Deliberative Safety as a Design Principle
GuardReasoner fits into a broader trend toward deliberative safety mechanisms that mirror how careful human judgment works. When confronted with an ambiguous situation, a safety-conscious person doesn’t reflexively label it; they reason through the potential harms, consider context, and then decide. This is computationally more expensive than pattern matching—but in safety-critical applications, the cost of a wrong decision dominates the cost of more careful deliberation.
For embodied AI in particular, where the consequence of a safety failure is physical harm in the real world, the shift from reflexive to deliberative safety evaluation is not merely a performance improvement. It represents a different theory of how safety should work: not as a filter applied to outputs, but as a form of genuine understanding of what harm means and why it matters.
The key open question is whether reasoning-based safety can scale to the full complexity of embodied action—where harm is physical and contextual rather than linguistic—and whether the reasoning chains generated remain accurate as models encounter the long tail of situations that no training dataset can anticipate.
Read the full paper on arXiv · PDF