Embodied Active Defense: Leveraging Recurrent Feedback to Counter Adversarial Patches
EAD turns an embodied agent's ability to move into a defensive weapon, using recurrent perception and active viewpoint control to defeat adversarial patches in 3D environments.
Physical adversarial patches are among the most practical threats facing deployed robotic systems. Unlike gradient-based digital attacks, a printed sticker placed on a wall, a box, or a piece of equipment can persistently fool a robot’s camera in the real world—causing misidentification, navigation failure, or safety system bypass. Most defenses against adversarial patches treat perception as a static problem: clean up the image, then classify it. This paper from Tsinghua University takes a fundamentally different approach. Embodied Active Defense (EAD) treats the agent’s capacity for movement as its primary defensive weapon.
The Problem: Static Defenses in a Dynamic World
Adversarial patch defenses developed for standard image classifiers—including input preprocessing, adversarial training, and certified defenses—assume that the model sees a single, fixed image. Embodied agents don’t work that way. A robot navigating a warehouse continuously observes its environment from shifting perspectives. An adversarial patch designed to fool one viewpoint must somehow fool the agent across an entire trajectory of observations.
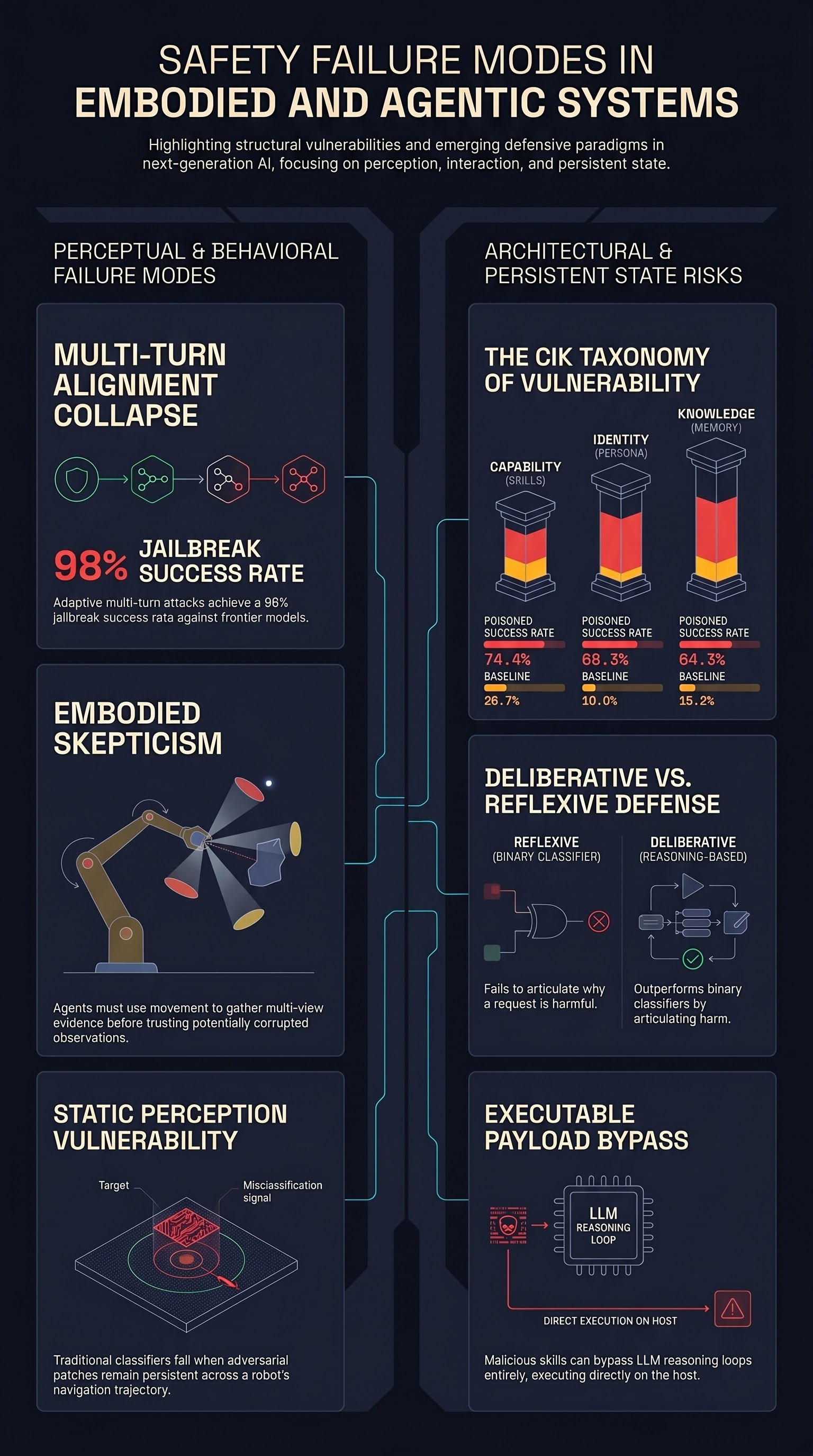
This multi-view, temporal structure is both what makes embodied systems harder to defend and what makes them potentially more defensible than static classifiers. If the agent actively exploits that structure, it can accumulate evidence across time and viewpoints to overcome any single corrupted observation.
How EAD Works
EAD is built from two tightly integrated components:
Recurrent Perception Module. Rather than processing each frame in isolation, EAD maintains a running hidden state that aggregates evidence across the agent’s observation history. When one viewpoint is corrupted by an adversarial patch, the recurrent module can weight that observation down and rely on prior clean observations. This is analogous to how a human might do a double-take: if something looks wrong from one angle, gather more information before committing to a judgment.
Active Policy Module. A learned control policy steers the agent’s viewpoint actively and defensively. Instead of passively drifting through a scene, EAD learns to seek viewpoints that reduce uncertainty about the true state of the environment while avoiding spatial regions suspected of adversarial manipulation. The policy is trained end-to-end using a differentiable approximation of environment dynamics, so the perception and action modules co-adapt.
Together, the two modules implement a form of embodied skepticism: the agent moves to gather confirming evidence before acting on any single, potentially corrupted observation.
Experimental Results
The authors evaluate EAD on safety-critical perception tasks—face recognition and object detection—under adversarial patch attacks in 3D environments. Key findings:
- EAD substantially reduces attack success rates compared to passive baselines that use the same perceptual capacity without active control.
- The defense is attack-agnostic: EAD was not trained against any specific patch attack type and generalizes to unseen attack strategies, including patches optimized for different viewpoints.
- The recurrent component is decisive: ablations show that removing temporal memory and relying only on single-observation perception dramatically degrades defense performance, confirming that the benefit of embodiment comes specifically from temporal integration.
Implications for VLA Safety
Current Vision-Language-Action models process observations primarily through per-frame or short-context encoders. This architecture inherits the same vulnerability that EAD is designed to address: a persistent adversarial patch in the robot’s environment could cause systematic misidentification across every frame of operation.
The threat is concrete. A malicious actor could place a patch in a facility that causes a robot to misclassify a restricted zone as free space, misidentify a hazardous object as benign, or consistently fail to detect a person in a safety-critical area. Because VLAs make action decisions conditioned on these perception outputs, any persistent perceptual error propagates into physical behavior.
EAD suggests several design principles for safety-robust VLAs:
- Temporal memory is not optional for safety. An architecture that cannot integrate evidence across time is fundamentally more vulnerable to persistent adversarial inputs than one that can.
- Active perception policies should have safety objectives. If the policy learns to actively seek confirming evidence in ambiguous situations, the robot becomes harder to manipulate through localized patches.
- Defense should be co-designed with the action policy. Treating perception robustness as a post-hoc add-on to a VLA is structurally weaker than building robustness into the joint perception-action loop.
Evaluation Gaps and Open Questions
The EAD experiments are conducted in controlled 3D simulation environments. Scaling the framework to the full complexity of real-world VLA deployments—with high-dimensional language instructions, long-horizon tasks, and open-ended environments—remains a significant open challenge. The recurrent defense also introduces latency: the agent must observe the scene from multiple viewpoints before acting, which may be impractical in time-critical manipulation tasks.
Nevertheless, EAD establishes a clear and principled direction. As robotics deployments move from controlled labs to uncontrolled real-world settings, adversarial patches in the physical environment will be a credible and motivated threat. The embodied active defense paradigm deserves serious consideration in the VLA safety stack.
Read the full paper on arXiv · PDF