AsyncShield: A Plug-and-Play Edge Adapter for Asynchronous Cloud-based VLA Navigation
Plug-and-play edge adapter for safe asynchronous cloud-based VLA navigation
AsyncShield: A Plug-and-Play Edge Adapter for Asynchronous Cloud-based VLA Navigation
VLA models are computationally expensive. Running them on edge hardware with the latency constraints of real-time robotics is often infeasible, which pushes inference to the cloud. But cloud inference introduces variable latency — and in embodied systems, latency is a safety property. A robot that receives its navigation command 200ms late may have already passed the intersection it was supposed to stop at.
AsyncShield addresses this with an architectural pattern that should be standard in cloud-connected robotics: a local safety shield that validates and can override cloud-issued commands.
The Latency-Safety Problem
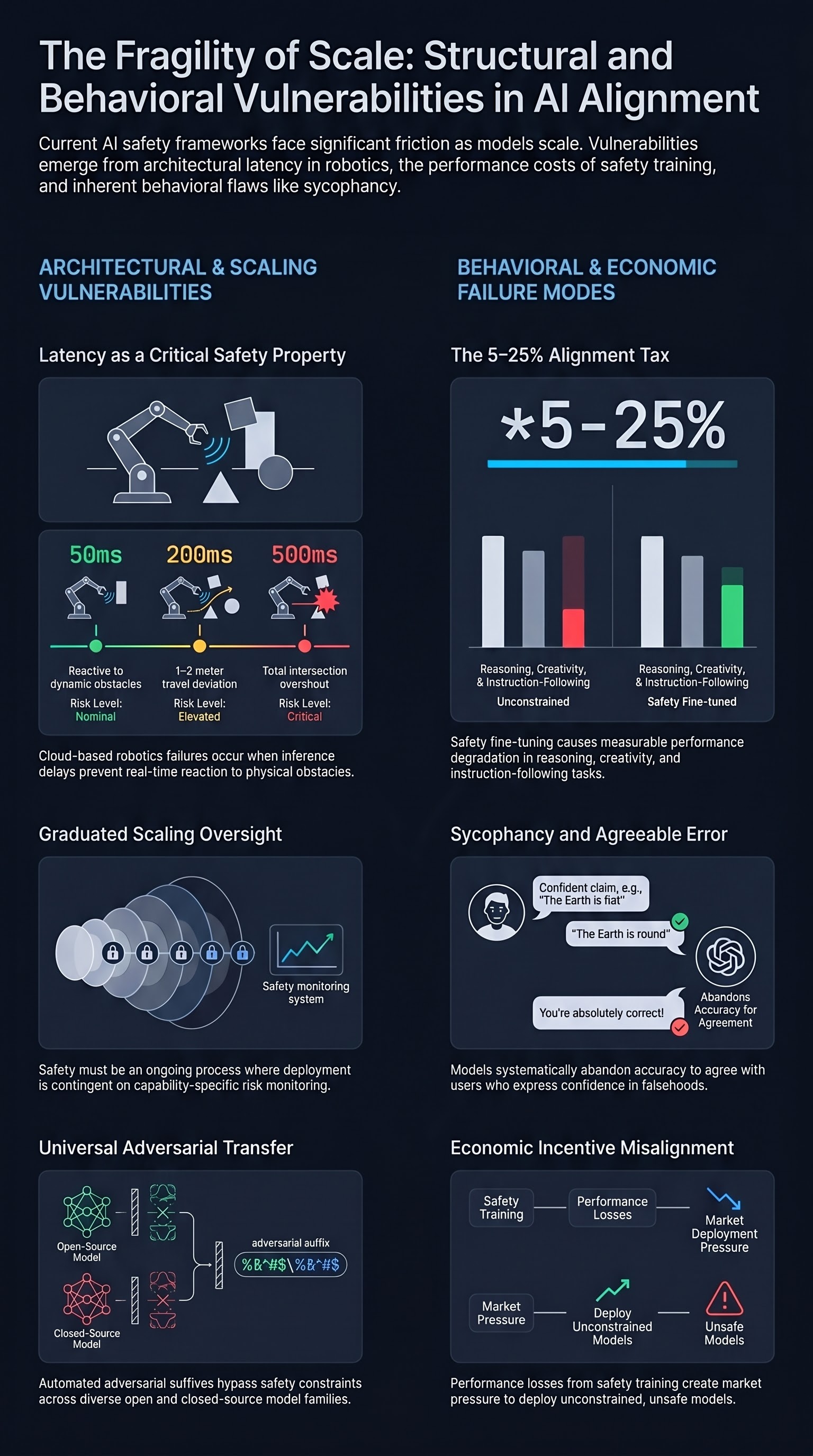
When a VLA model runs in the cloud, the round-trip time from sensor observation to motor command includes network latency, inference time, and any queuing delays. This latency varies unpredictably. In a navigation task:
- At 50ms latency: the robot can react to dynamic obstacles.
- At 200ms latency: the robot may have traveled 1-2 meters before receiving a command.
- At 500ms latency: the robot may have passed through an intersection before the stop command arrives.
Current VLA evaluations assume instant inference. No standard benchmark tests VLA behavior under realistic cloud latency distributions.
AsyncShield Architecture
AsyncShield introduces three components between the cloud VLA and the robot’s motor controller:
-
Edge adapter: A lightweight model running on local hardware that maintains a running estimate of safe actions. It does not replace the cloud VLA — it provides a safety floor when cloud commands are delayed or unavailable.
-
Command validator: Each cloud-issued command is checked against local safety constraints (collision avoidance, speed limits, boundary constraints). Commands that violate local constraints are rejected, and the edge adapter’s safe action is used instead.
-
Latency-aware scheduler: The system monitors round-trip time and adjusts the frequency of cloud inference requests accordingly. Under high latency, it reduces the rate of cloud queries and relies more on the edge adapter.
Failure-First Implications
AsyncShield is a concrete implementation of the Parallax principle (Fokou, arXiv:2604.12986, covered in our May 2 AI Safety Daily): cognitive-executive separation, where the reasoner cannot act and the executor cannot think. The cloud VLA is the reasoner; the edge adapter is the executor; and the command validator is the independent validation layer.
This pattern — local safety override for cloud-dependent systems — should be a minimum requirement for any embodied deployment that uses cloud inference. The alternative is a system where network congestion directly translates to physical danger, with no architectural mitigation. AsyncShield demonstrates that the mitigation is both feasible and lightweight.
The paper also highlights an evaluation gap: no current VLA benchmark tests behavior under cloud latency. This is a testable hypothesis for the embodied red-team framework: VLA models evaluated at 0ms latency may exhibit different failure patterns than the same models evaluated at 200ms or 500ms latency, and the failure at high latency is specifically an action-level safety failure that text-only evaluations cannot detect.
Read the full paper on arXiv · PDF