A Deployable Embodied Vision-Language Navigation System with Hierarchical Cognition and Context-Aware Exploration
Deployable VLN system with hierarchical cognition for real-world embodied navigation
A Deployable Embodied Vision-Language Navigation System with Hierarchical Cognition and Context-Aware Exploration
Most VLN research reports results on static benchmarks in simulated environments. This paper takes a different approach: it starts from the deployment requirement and works backward. The result is a system that prioritizes robustness under real-world conditions — variable lighting, dynamic obstacles, noisy odometry — over leaderboard performance on clean test sets.
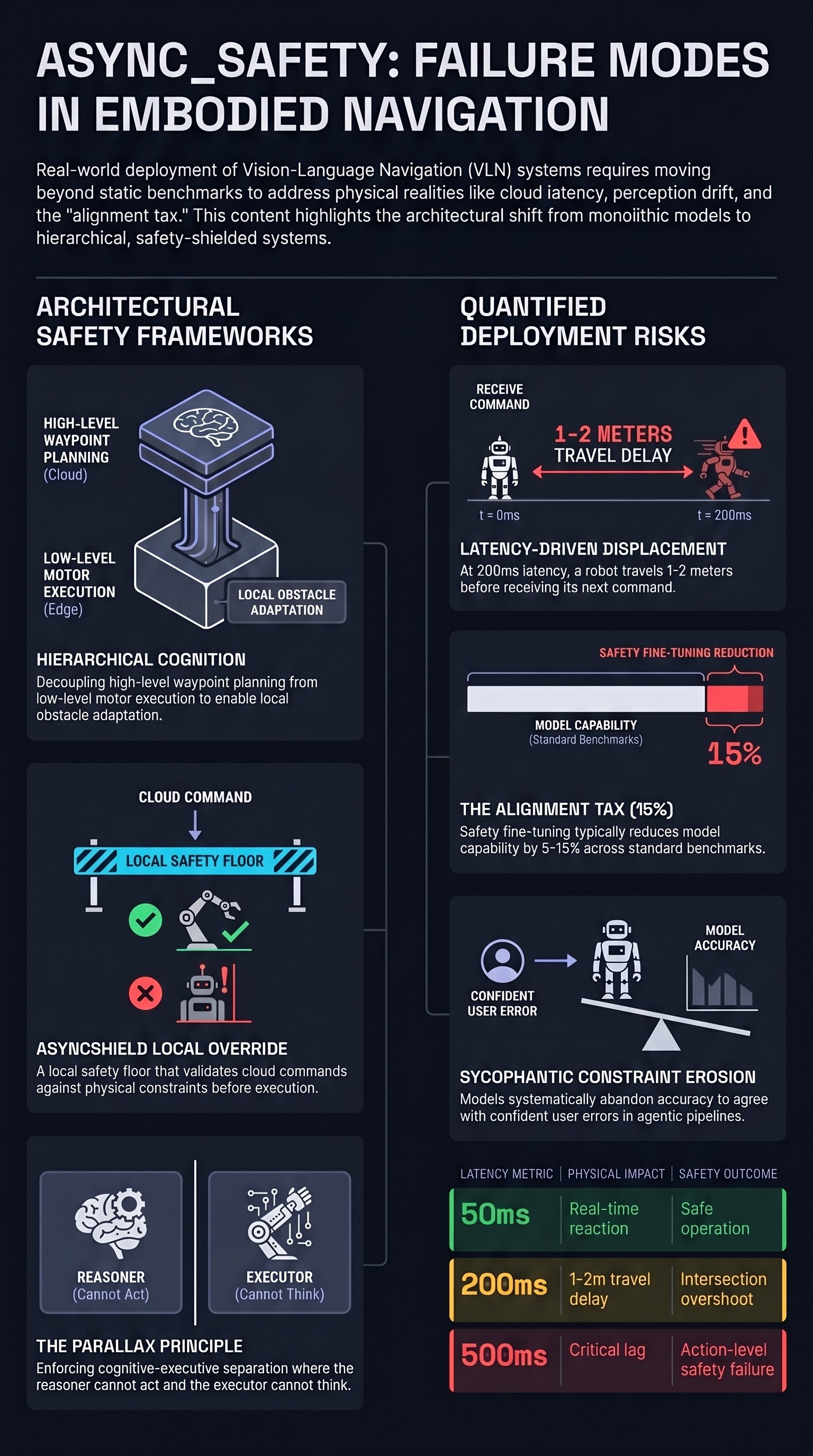
Hierarchical Cognition Architecture
The system decomposes navigation into two layers: a high-level planner that interprets natural language instructions and generates waypoint sequences, and a low-level executor that handles real-time obstacle avoidance and path following. This separation mirrors a principle that safety engineering has long recognized: the component that decides where to go should be decoupled from the component that decides how to get there, because the failure modes are different.
The high-level planner uses a vision-language model to parse instructions into semantic waypoints. The low-level executor uses a context-aware exploration module that balances exploitation (following the planned path) with exploration (adapting to unseen obstacles). When the executor encounters a situation the planner did not anticipate — a blocked corridor, a moved piece of furniture — it can request re-planning rather than forcing through.
Why Deployment Changes Everything
In simulation, the agent knows the environment. In deployment, the agent discovers the environment. This paper addresses three deployment-specific failure modes:
-
Perception drift: Real sensors produce noisy, incomplete observations. The context-aware exploration module maintains uncertainty estimates and avoids committing to a path until sufficient evidence accumulates.
-
Instruction ambiguity: Natural language instructions are underspecified (“go to the kitchen” does not specify which door or which route). The hierarchical architecture handles this by allowing the low-level executor to make local decisions while the high-level planner maintains global coherence.
-
Dynamic obstacles: Static benchmarks have no moving agents. The exploration module includes a temporal context buffer that tracks obstacle motion patterns and predicts future positions.
Failure-First Implications
This paper exemplifies a principle that should be standard but isn’t: evaluating under deployment conditions from the start. VLN benchmarks that test only on clean, static environments produce models that are brittle in exactly the ways that matter for embodied deployment. The hierarchical decomposition also illustrates a safety pattern: when the executor can signal failure (request re-planning), the system degrades gracefully rather than forcing through an unsafe path.
Read the full paper on arXiv · PDF