Vision-and-Language Navigation for UAVs: Progress, Challenges, and a Research Roadmap
Comprehensive survey of Vision-and-Language Navigation for UAVs, charting the evolution from modular approaches to foundation model-driven systems and identifying deployment challenges and future...
Vision-and-Language Navigation for UAVs: Progress, Challenges, and a Research Roadmap
Imagine a search-and-rescue mission in an unstructured, GPS-denied environment. A human operator issues a complex, high-level command to a UAV: “Fly past the collapsed bridge and find people waving from the rooftops.” For a machine, this is a “long-horizon task” requiring the navigation of continuous 3D action spaces while simultaneously grounding abstract linguistic concepts into a noisy, physical world.
We are currently witnessing the birth of Vision-and-Language Navigation for UAVs (UAV-VLN), a pivotal challenge in embodied AI. The field is rapidly evolving from rigid, pre-programmed flight paths toward intuitive, language-based autonomy where drones do not just follow coordinates, but understand instructions.
The Great Shift: From Modular Pipelines to Integrated “Brains”
Historically, robotics relied on “decoupled” or modular pipelines. As researchers, our primary grievance with these systems is the “information bottleneck” and the “error propagation” that occurs between stages. If the perception module misidentifies a landmark, that error cascades through the reasoning and control stages, often leading to catastrophic mission failure.
We are shifting toward Embodied Multimodal Large Models (EMLMs). These unified frameworks treat the drone’s “thinking” and “doing” as a cohesive sensorimotor policy, bypassing the brittle “Sense-Think-Act” modules of the past.
Comparing Methodologies: The Architectural Evolution
| Feature | Traditional Modular Pipeline | Modern EMLM Approach |
|---|---|---|
| Architecture | Decomposed stages (Perception Reasoning Control) | Unified, integrated “Cognitive Core” |
| Information Flow | Sequential; prone to error propagation | Cohesive; avoids information bottlenecks |
| Reasoning | Knowledge Graphs and Decision Trees | Spatial Memory and Language Embeddings |
| Control | Trajectory Planners (PID/MPC) | Direct action output or Tokenized Actions |
| Input/Output | Raw data Geometric Map Path | Multimodal tokens End-to-End Policy |
How Drones Understand the World: The POMDP Framework
To formalize autonomous flight, we model the task as a Partially Observable Markov Decision Process (POMDP). In this framework, the drone never truly knows the “Unobservable State” (), which includes the UAV’s full 6-DoF (Degrees of Freedom) pose and the environment’s exact 3D geometry.
Instead, the drone relies on an “Observation” (), which is a composite of:
- Egocentric camera input (the drone’s eye view).
- Proprioceptive data from the Inertial Measurement Unit (IMU).
- The natural language instruction ().
The drone must map these observations to an Action Space (). Aerial navigation introduces a unique trade-off here:
- Continuous Control: Actions are linear and angular velocity commands (e.g., 4-DoF control: ). This offers high precision and smooth, agile flight but creates a high-dimensional search space that makes long-horizon planning difficult.
- Discrete Actions: Actions are predefined primitives (e.g., “Fly forward 2m”). This simplifies decision-making and is highly interpretable, but can lead to inefficient, “choppy” flight paths.
The Three Paradigms of UAV Intelligence
Our research taxonomy breaks down the evolution of UAV-VLN into three distinct waves:
Paradigm 1: Modular & Early Learning
These systems pioneered the fusion of vision and language, evolving from classical RRT planners to early neural networks. Key benchmarks like AerialVLN established baselines such as CMA (Cross-Modal Attention) and LAG (Look-Ahead Guidance). While they proved language-guided flight was possible, they often struggled to generalize to unseen environments.
Paradigm 2: Long-Horizon Spatiotemporal Understanding
To handle complex instructions involving distant landmarks, drones must remember their history.
- Temporal Transformers: Models like HAMT treat the drone’s history of observations and actions as a unified sequence, allowing the agent to “look back” at past events to inform current decisions.
- Visual Language Maps (VLMaps): These systems project VLM features onto 3D reconstructions, creating a queryable map that allows the drone to perform spatial reasoning (e.g., “Where was that red truck I flew over earlier?”).
Paradigm 3: Foundation Model-Driven Systems
This is the current state-of-the-art, utilizing massive pre-trained models as the drone’s cognitive core.
- VLMs as Cognitive Cores: Models like FlightGPT use “Chain-of-Thought” (CoT) reasoning to decompose vague commands into executable sub-goals.
- VLAs as End-to-End Policies: Models like OpenVLA and RT-2 treat robot actions as language tokens, mapping pixels directly to motor commands.
- World Model Integration: The newest frontier involves “Navigation World Models” (NWM) that use video diffusion to predict future visual experiences, giving drones “physical common sense” to plan safer trajectories.
The Simulation Secret: Training Without Crashing
We cannot train drones in the real world due to the high cost of hardware failure. High-fidelity simulation is the core enabling technology. We have moved from single-engine simulators (like AirSim or Gazebo) to Multi-Engine Pipelines like OpenFly.
OpenFly integrates data from Google Earth, GTA V, and 3D Gaussian Splatting (3DGS). The technical breakthrough of 3DGS is that it provides a “differentiable” world. This allows mathematical gradients to flow back through the entire perception-action loop, enabling us to train end-to-end policies that transfer far more effectively to reality.
Essential Evaluation Resources
To quantify progress, we rely on specific metrics:
- Success Rate (SR): Did the drone reach the target?
- Success weighted by Path Length (SPL): How efficient was the route?
- normalized Dynamic Time Warping (nDTW): How well did the path align with the reference trajectory?
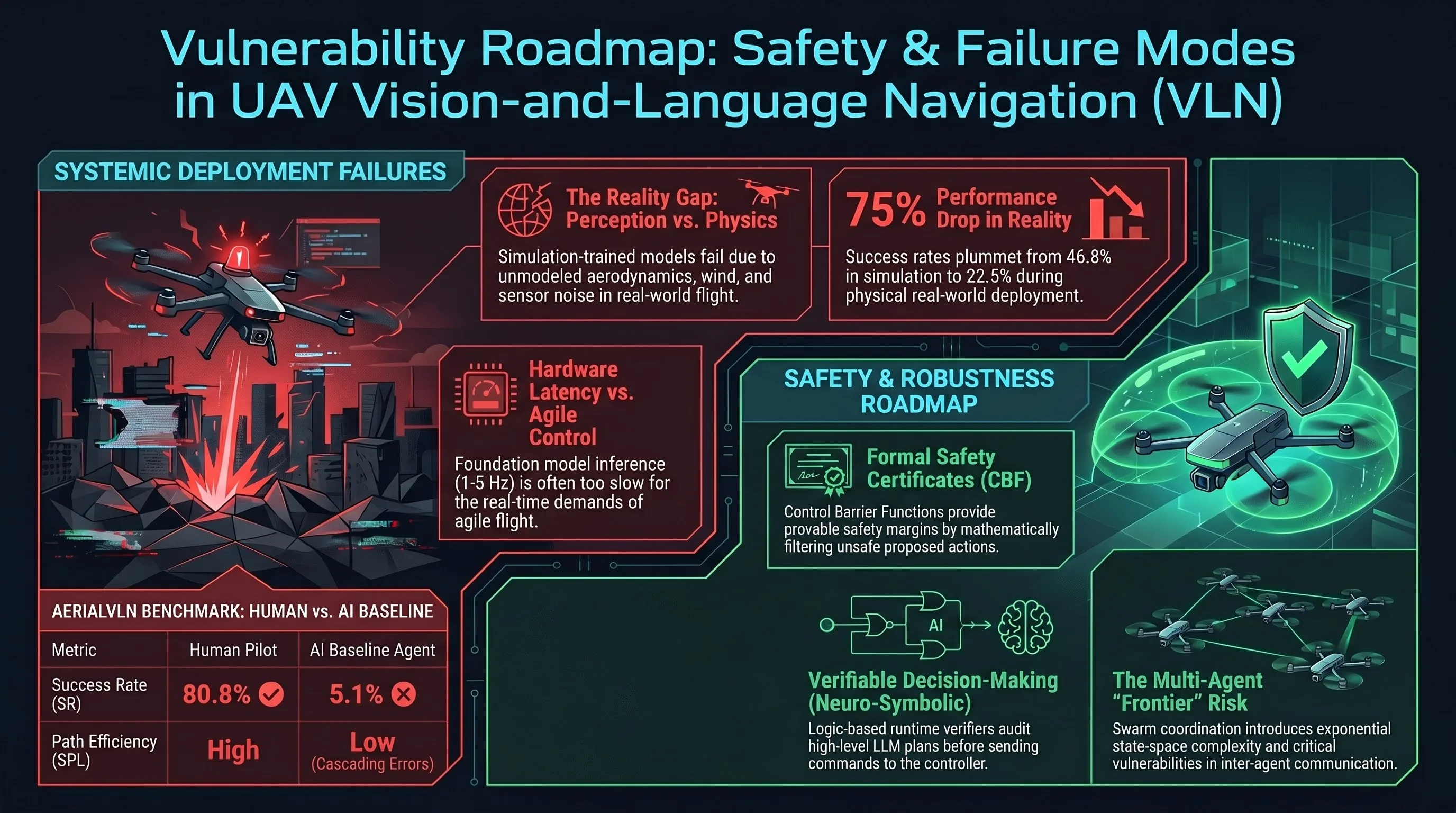
The “Reality Check”: Challenges Impeding Deployment
Despite the hype, the Sim-to-Real Gap remains daunting. In the AerialVLN benchmark, the LAG baseline achieved a meager 5.1% success rate, while humans achieved 80.8%. Humans are currently 16 times more effective than our best models at navigating these environments.
The primary hurdles include:
- Linguistic Ambiguity: Humans are vague. This has spurred the development of the AVDN (Aerial Vision-and-Dialog Navigation) benchmark, where drones use multi-turn dialog to seek clarification.
- Onboard Constraints: Running a 7B-parameter VLA model on a drone with a limited battery requires extreme optimization or edge-computing offloading.
Conclusion: The Roadmap to Autonomous Swarms
The next frontier for UAV-VLN is not just one drone, but many. We are looking toward Multi-agent swarm coordination and Air-ground collaborative robotics (UAV-AGV). In these scenarios, a centralized “swarm brain” (a Multimodal Large Language Model) interprets a mission and orchestrates a fleet of heterogeneous robots to work in unison.
Key Takeaways
- Unified Intelligence: The shift to EMLMs is unifying drone “thinking” and “doing,” eliminating the bottlenecks of traditional modular pipelines.
- Predictive Power: World Models and differentiable rendering (3DGS) are giving drones the ability to predict the physical future, leading to more robust policies.
- Data is the Weapon: Scaling data diversity via multi-engine pipelines is our primary weapon against the sim-to-real gap, which remains the single greatest hurdle to 80%+ success rates.
As we move toward these “companion” UAVs, drones will cease to be tools we operate and instead become partners we communicate with, transforming everything from disaster response to global logistics.
Read the full paper on arXiv · PDF