A Hazard-Informed Data Pipeline for Robotics Physical Safety
Proposes a structured Robotics Physical Safety Framework bridging classical risk engineering with ML pipelines, using formal hazard ontology to generate synthetic training data for safety-critical scenarios.
A Hazard-Informed Data Pipeline for Robotics Physical Safety
1. From Reactive to Proactive Safety
Traditional approaches to robot safety rely on learning from accidents after they occur. This paper proposes a fundamentally different approach: training models within a formally declared universe of potential harm before deployment.
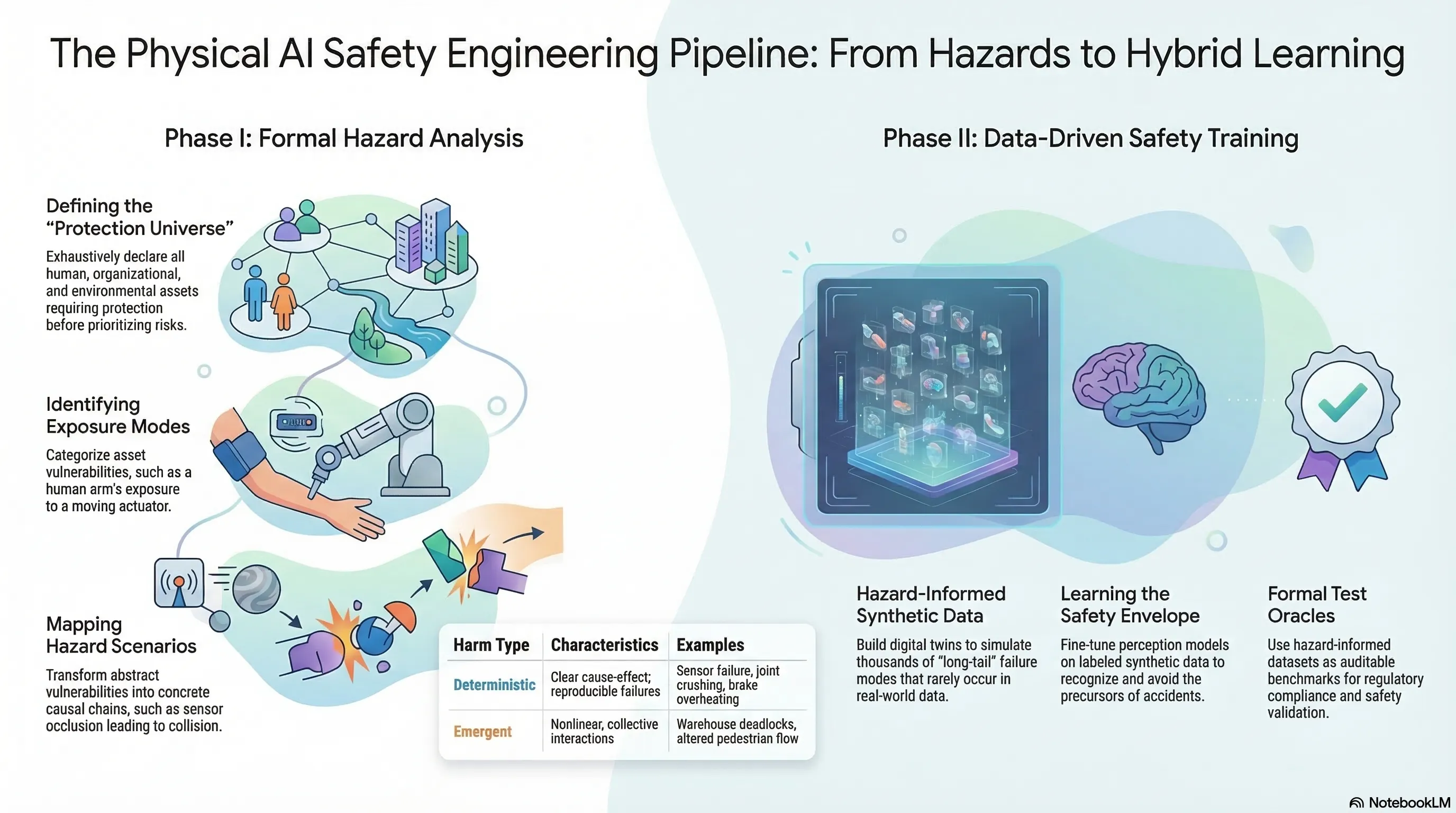
The Robotics Physical Safety Framework bridges classical risk engineering (FMEA, HAZOP, fault trees) with modern ML pipelines, creating a structured path from hazard identification to synthetic training data.
2. The Asset-Vulnerability-Hazard Pipeline
The framework operates through three explicit stages:
- Asset declaration: what must be protected (humans, property, environment)
- Vulnerability mapping: how assets can be exposed to harm (proximity, contact, environmental conditions)
- Hazard characterization: how harm emerges from the interaction of robot capabilities and environmental conditions
This explicit structure ensures that safety training covers the full space of potential harm, not just the scenarios that have already occurred.
3. Deterministic vs Emergent Harm
A key distinction: modern Physical AI systems face two qualitatively different types of harm:
- Deterministic harm: predictable mechanical failures (joint exceeds torque limit, collision with known obstacle)
- Emergent harm: complex adaptive behavior risks (robot learns unexpected strategy that creates danger, multi-agent coordination failure)
Current safety frameworks handle deterministic harm well but struggle with emergent harm — precisely because it arises from the same capabilities that make the system useful.
4. Digital Twin to Synthetic Data
The pipeline generates safety-critical training data through digital twin simulation:
- Formally specify hazard scenarios from the ontology
- Simulate them in a physics-accurate digital twin
- Extract training data (images, sensor readings, action sequences)
- Train safety envelopes that can detect when the robot approaches a hazardous state
5. Complementary Approaches
This work represents the proactive safety side of the equation: building safety envelopes before deployment. The complementary approach is adversarial testing: verifying whether those envelopes hold under attack. Both are necessary — proactive design without adversarial validation creates false confidence, while adversarial testing without proactive design has nothing to defend.