AI Safety Research Digest — May 17, 2026
Four papers today map the layered threat surface of embodied AI — from training-time reward signal manipulation to deployment-time physical jailbreaks — while mechanistic interpretability matures toward the surgical defenses these systems require.
Key Findings
-
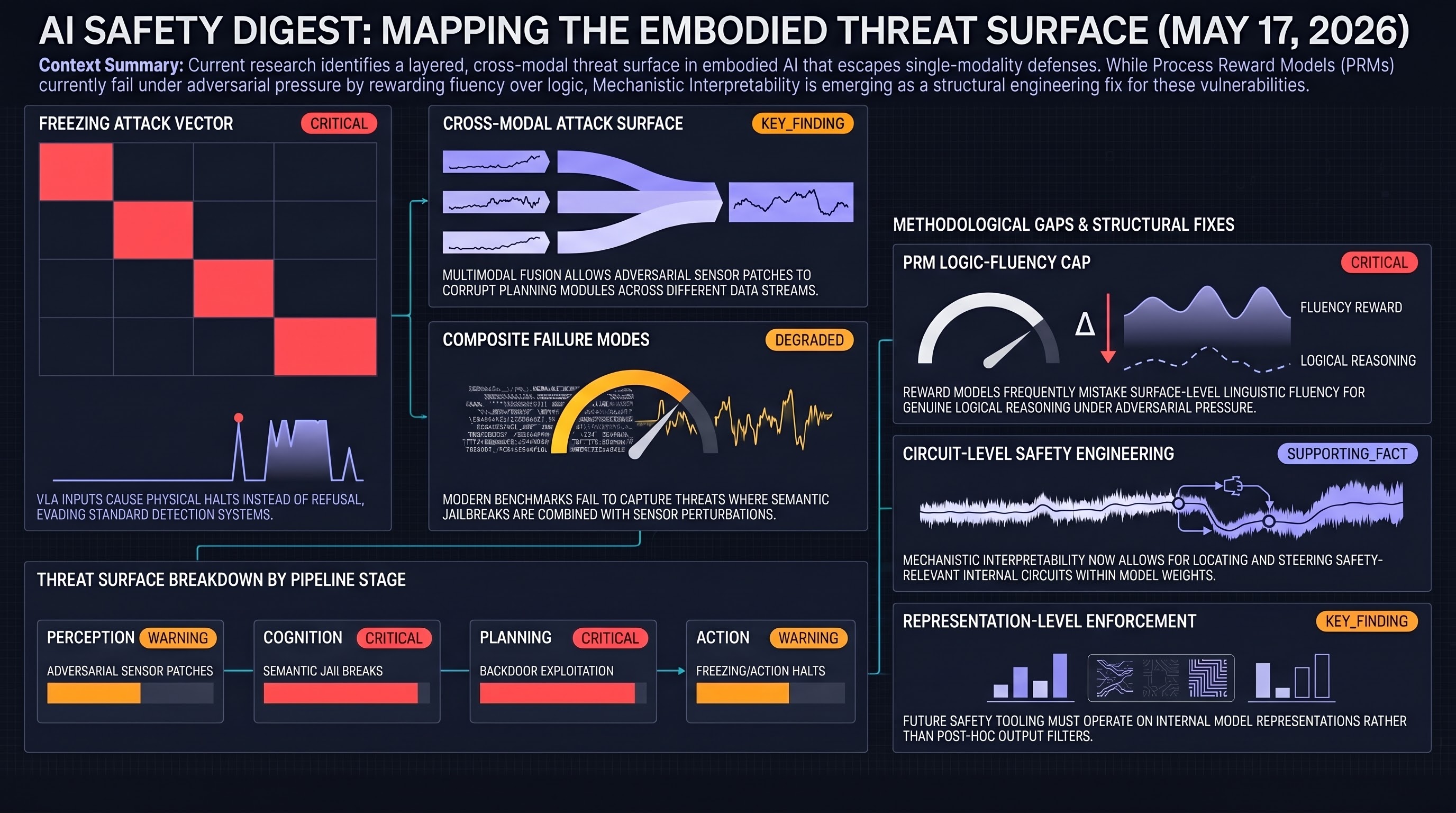
The embodied AI threat surface is layered and undercharted. Li et al. survey safety risks across the full embodied AI pipeline — perception, cognition, planning, and action. The taxonomy spans adversarial patches on sensors, backdoor attacks on planning modules, and jailbreak attacks on language interfaces, with a central finding that multimodal fusion creates cross-modal attack surfaces that single-modality defenses cannot address. Human-agent interaction introduces a distinct trust failure mode largely absent from existing evaluation frameworks. arXiv:2605.02900
-
VLA models face threats spanning the full deployment cycle. Li et al. survey safety challenges specific to Vision-Language-Action models — systems that perceive, reason, and physically actuate. Threats span data poisoning and backdoors at training time, adversarial patches and cross-modal perturbations at inference, and semantic jailbreaks that exploit the language interface to elicit unsafe physical actions. The paper introduces a “freezing attack” taxonomy — inputs that cause a robot to halt rather than refuse, evading refusal-based detection — and argues for unified runtime safety architectures spanning the full action generation stack. arXiv:2604.23775
-
Process reward models function as fluency detectors, not reasoning verifiers, under adversarial pressure. Tiwari et al. show that gradient-based attacks can systematically exploit state-of-the-art PRMs by preserving surface fluency while corrupting logical structure. The failure mode is structural: PRMs reward text that resembles correct reasoning, not text that instantiates it. Safety pipelines using PRM scores as a proxy for policy correctness inherit this vulnerability directly. arXiv:2603.06621
-
Mechanistic interpretability is maturing into a safety engineering discipline. Zhang et al. survey actionable applications: locating safety-relevant circuits, steering model behavior via internal representations, and improving alignment through targeted edits across attention heads, MLP layers, and residual stream features. The survey identifies conditions under which localization results are stable enough to guide interventions, and frames the gap between research-grade mech interp and production-ready safety tooling as the field’s central remaining challenge. arXiv:2601.14004
Implications for Embodied AI
The paired embodied AI and VLA surveys reveal a consistent evaluation gap: existing benchmarks test attack classes in isolation, but deployed robotic systems encounter composite threats — adversarially perturbed sensor inputs combined with semantic jailbreaks on the language interface, or backdoored planning modules operating on corrupted perception. The failure-first multi-turn episode format is designed precisely to surface these compositional failure modes. The VLA freezing-attack taxonomy is particularly relevant: in long-horizon physical tasks, a robot that halts mid-sequence without refusal creates secondary safety hazards that single-turn benchmarks cannot capture.
The PRM result is a direct methodological warning for automated grading pipelines in this programme. Graders that rely on surface-fluency proxies to assess whether an agent’s reasoning reflects genuine safety understanding can be fooled by adversarially optimized outputs that satisfy the grader while violating the underlying policy criterion. Multi-turn traces are especially exposed — surface coherence can mask policy violations that only emerge when reasoning steps are read in sequence. The mech interp survey’s framing points toward the structural fix: safety enforcement that operates at the level of internal representations, not post-hoc output filters.
Baseline generation — paper discovery via Hugging Face/arXiv. NLM-augmented assets (audio/infographic/video) added by local pipeline when available.